 手機直線:
手機直線: 谘詢熱線:0571-56211150
谘詢熱線:0571-56211150







通過模仿人手功能的技術裝置稱為機械手。機械手模仿著人手的關節動作,按預定設計程序、行動和期望達到自動抓放、挪動操作的自動機械裝置。用於工業生產中的機械手稱為工業機械手。機器人技術是集運動學,動力學理論、機械設計與製造技術、計算機硬件與軟件技術、控製理論、電液伺服隨動技術、傳感器技術、人工智能理論等科學及技術領域的綜合應用。
機械手是工業流水生產線中應用廣泛的設備,可進行拾取、分流、包裝等工作,在軍用,民用等工業領域起著重要的作用。作為現代化工廠常用的工作機構,機械手極大地決定了流水線能否正常工作、高效運轉的關鍵部件,機械手設計,優化的水平會直接影響工農業生產。夾取機械手是其中應用較為廣泛的一類,在產品的設計階段對機械手進行運動仿真,運動合理與否、工作機構各構件之間是否發生幹涉可以直觀地檢測出來並及時修正。因此,機械手的優化設計及運動仿真具有重要的意義。基於對機械手優化設計及運動仿真的有限元分析研究,通過對機械手優化設計所需要的合理性進行了簡單設計並修正。
CATIA是由法國達索公司研發的一款功能強大並廣泛應用於三維實體建模、裝配、有限元分析軟件。與同類軟件相比,CATIA的操作界麵更加簡潔明了,容易上手。並且具有強大的三維複雜曲麵造型功能,能進行混合建模技術,使以往繁瑣的建模過程更加靈活和高效。
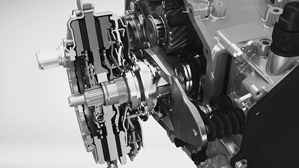
三維建模是虛擬分析的基礎,模型的精細程度及尺寸關係直接影響後續工作。對機械手進行三維建模,其包括支撐臂俯仰臂、旋轉臂兩個夾手。如圖1所示,底座起固定作用,支撐臂,轉軸可360度旋轉,俯仰臂及夾手旋轉度數待分析。利用約束關係對其進行三維裝配,將底座固定添加運動副關係,利用鉸接運動副將其餘零件組裝起來,對可運動點添加角度驅動。如圖1所示。
CATIA的運動分析模塊中蘊涵了空間解析幾何的數學原理,通過建立幾何模型、定義運動學模型,采用運動仿真、運動軌跡、參數曲線等一些直觀輸出形式,就可以初步分析機構的運動特性,得出量化的結果。運動命令對機構進行初始仿真觀察,理解各個單元運動目的。然後對其運動添加約束:利用規則與公式關係,使得兩個夾手的角度相等:機械手\命令\命令\角度=機械手\命令\命令\角度在知識專家模塊中,利用ROLL工具,進行簡單編程:進入運動仿真工作台,用規則進行仿真,改變仿真步驟、時間參數,可以看到整體仿真效果。圖示中設置步驟數為80,運行步驟如果過快,將無法看到具體效果。程序中各時間是實際測試修改最後的結果。如圖所示。
對於複雜運動機構,可以通過機械裝置的分析,明確各實體的命令及運動副關係,被選中對象在三維圖中高亮顯示。如圖所示,該機械手含有5個驅動命令,5個運動副。
法則曲清晰地查詢到各對象隨時間的運動變化。如圖所示。
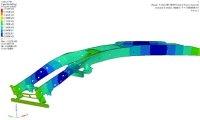
為了觀察關鍵點的運動特性,激活傳感器與檢測運動參數,圖中檢測3點的加速度,如圖設置。得到如圖的加速度曲線圖。
專業從事機械產品設計│有限元分析│CAE分析│結構優化│技術服務與解決k8 kaifa
杭州那泰科技有限公司
本文出自杭州那泰科技有限公司www.alllinkchina.com,轉載請注明出處和相關鏈接!